Product features:
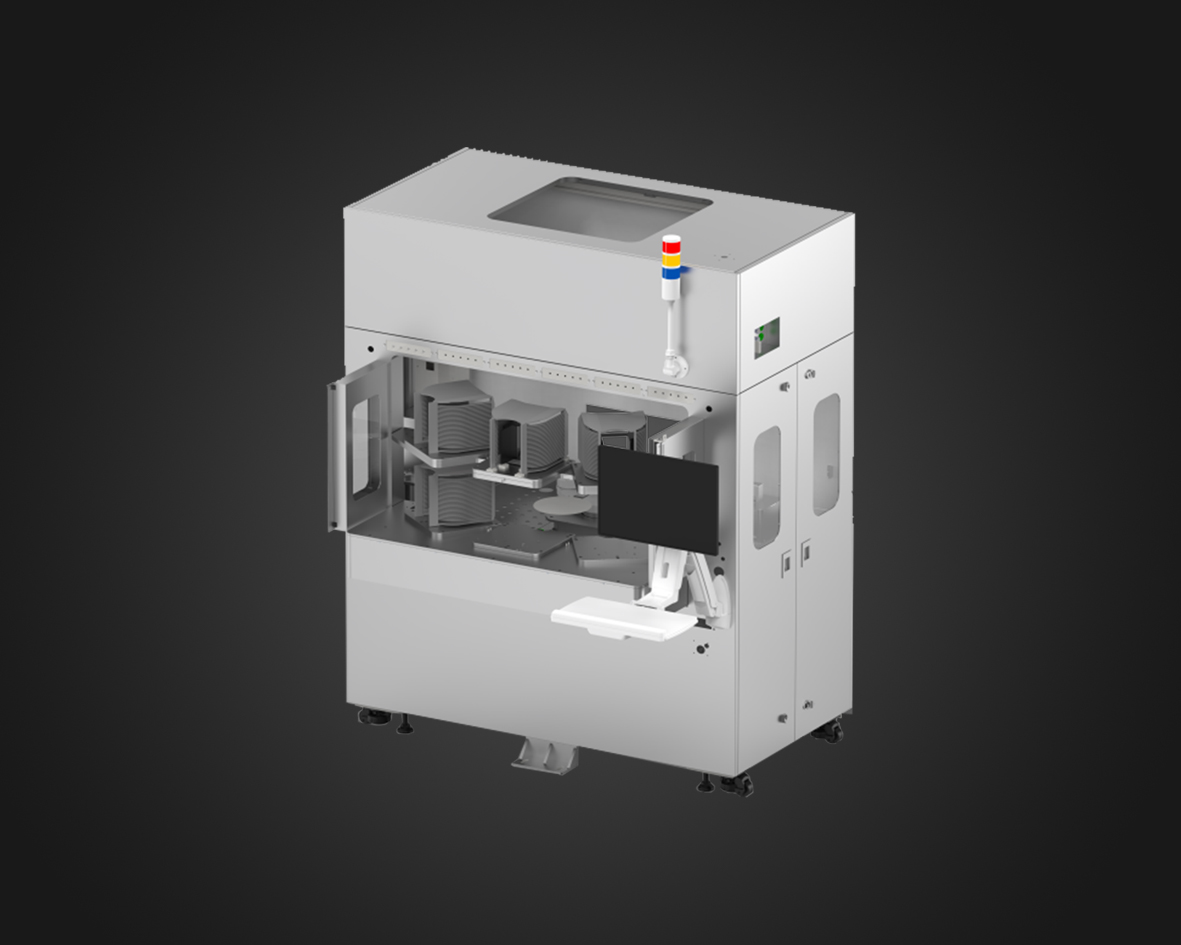
1. Adopting a two handed arm structure, it can achieve simultaneous retrieval and placement of two pieces, resulting in higher handling efficiency
2. Curved acceleration and deceleration control system for efficient and high-precision wafer handling
3. Equipped with high-performance motion sensors to ensure high-precision handling and stability
4. Compatible with the handling of 2-inch to 12 inch wafers
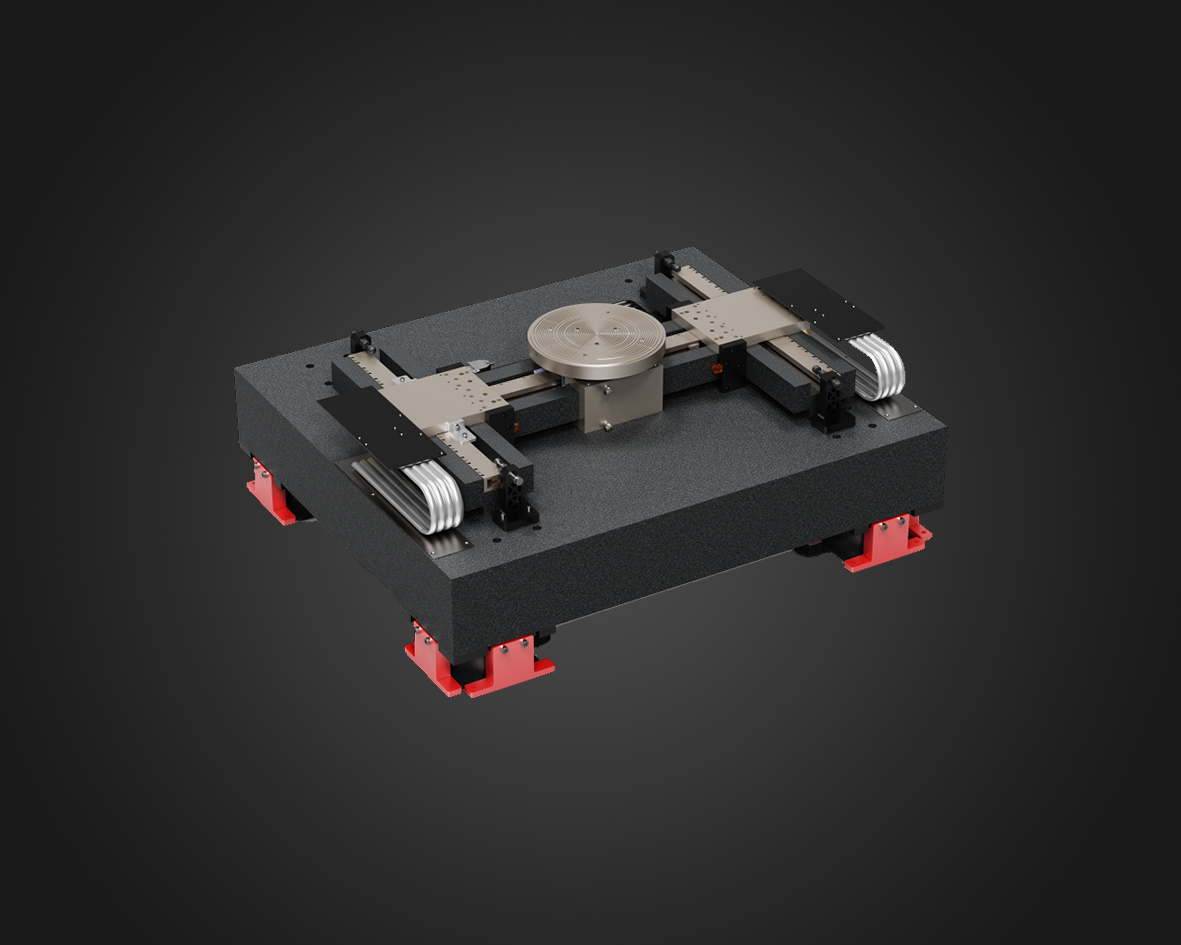
5. The base fixation method or flange fixation method can be selected based on the device layout
6. Suitable for vacuum adsorption, bottom support, edge clamping, and Bernoulli non-contact wafer fixation methods
7. Optional finger materials include carbon fiber, aluminum alloy, high-purity ceramics, and more
Product parameters:
Structure | Four axes (private server motor and ABS encoder) |
Wafer size | Suitable for 2-inch to 12 inch wafers |
Rated load | 2 Kg |
Communication control | RS232 and parallel I/O mode |
Movable range | Arm 320mm; Rotate 340 degrees; Lift 500mm |
Handling speed | Arm 1150 mm/sec; Rotate 270 degrees/sec; Lift 250mm/sec |
Repetitive accuracy | ±0.1mm |
Cleanliness level | Class1 |
Robot material | aluminium alloy |
Finger material | Ceramics, carbon fiber, aluminum alloy |
Pressure | Positive pressure of 0.4-0.5MPa; Negative pressure: below -70KPa |
Power Supply | AC 200-240V (single-phase) |
Wafer fixing method | Vacuum adsorption type, bottom support type, edge clamping type, Bernoulli non-contact type |
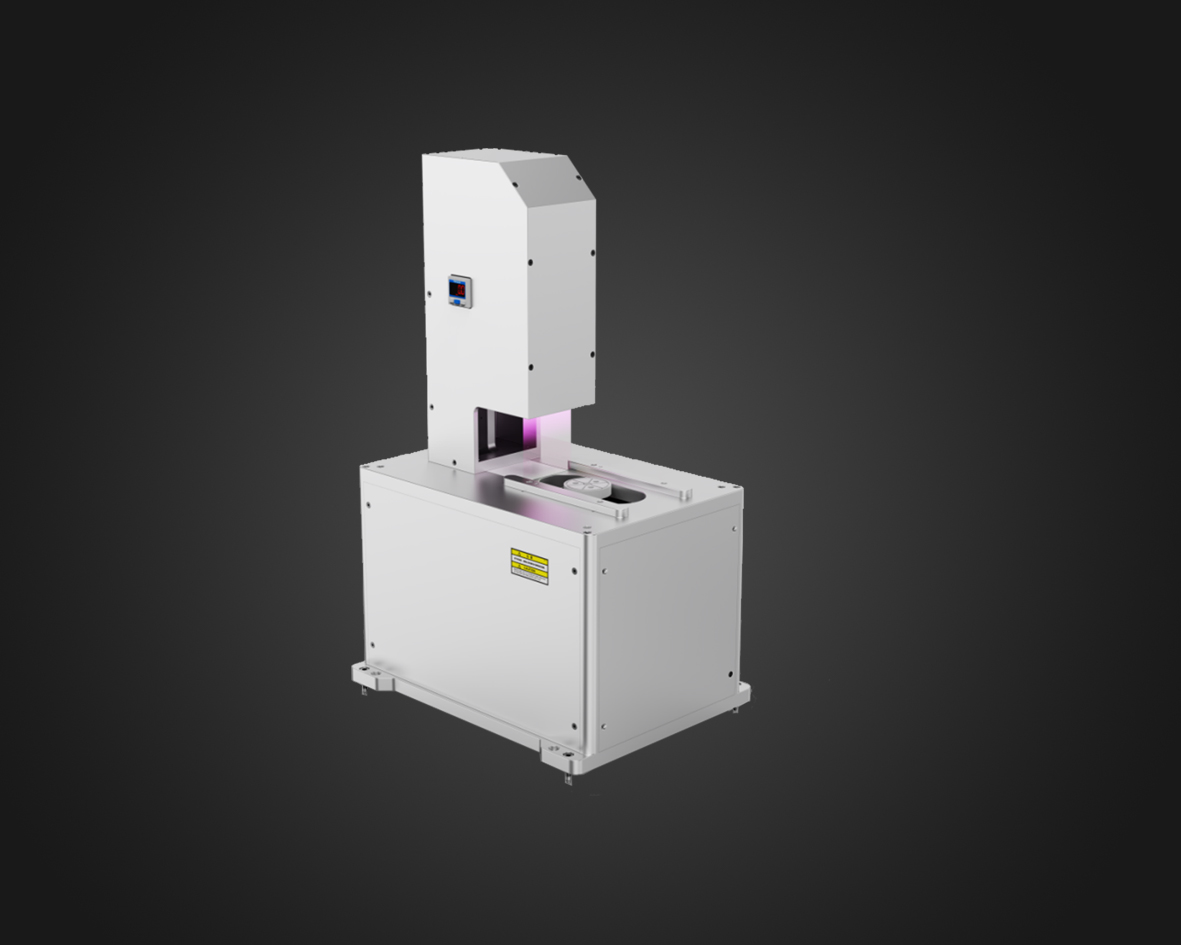
Application area | High speed handling of semiconductor wafers in atmospheric environment, various semiconductor equipment, EFEM transfer, adhesive development equipment, cleaning equipment, testing equipment, etc |

Long Press to Scan QR Code
Scan QR Code